2.5. Developing Application Program Interface (API)
In order to establish an interface between the platform and external model, a new class derived from base Model class has to be created, essentially implementing MuPIF Model interface.
The Model class defines a
generic interface in terms of general purpose, problem independent,
methods that are designed to steer and communicate the model.
This table presents an overview of application interface, the full
details with complete specification can be found in Model.
Method |
Description |
__init__(self, metaData) |
Constructor. Initializes the application. |
initialize(self, workdir, metaData, validateMetaData) |
Initializes model and sets workdir and metadata. |
get(self, objectTypeID, time=None, objectID=””) |
Returns an output of the model, specified by objectTypeID and objectID. |
set(self, obj, objectID=””) |
Sets an input of the model, specified by objectID and type of obj. |
solveStep(self, tstep) |
Solves the problem for given time step. |
finishStep(self, tstep) |
Called after a global convergence within a time step. |
getCriticalTimeStep() |
Returns the actual critical time step increment. |
getAssemblyTime(tStep) |
Returns assembly time within a timestep |
getApplicationSignature() |
Returns the application identification |
terminate() |
Terminates the application. |
From the perspective of individual simulation tool, the interface implementation can be achieved by means of either direct (native) or indirect implementation.
Native implementation of a Model interface requires model written in Python, or a model with Python interface. In this case the Model methods will be implemented directly using direct calls to suitable application’s functions and procedures, including necessary internal data conversions. In general, each application (in the form of a dynamically linked library) can be loaded and called, but care must be taken to convert Python data types into target application data types. More convenient is to use a wrapping tool (such as Swig [11], Boost [12] or PyBind11 [13]) that can generate a Python interface to the application, generally taking care of data conversions for the basic types. The result of wrapping is a set of Python functions or classes, representing their application counterparts. The user calls an automatically generated Python function which performs data conversion and calls the corresponding native equivalent.
Indirect implementation of a Model interface is based on wrapper class implementing Model interface that implements the interface indirectly, using, for example, simulation tool scripting or I/O capabilities. In this case the application is typically standalone application, executed by the wrapper in each solution step. For the typical solution step, the wrapper class has to cache all input data internally (by overloading corresponding set methods), execute the application from previously stored state, passing input data, and parsing its output(s) to collect return data (requested using get methods).
The example illustrating the indirect implementation is discussed further. The basics are the same, one has to define a new class derived from Model class, representing the interface to new (external) model. The implementation of this class has to provide implementation of all Model services, that require to establish communication channel to external model. Here we assume that no direct communication is available so we need to communicate with an external model indirectly, typically using files. The important fact is that this communication mechanism is only part of specific model class instance and is therefore hidden behing generic Model interface. Typical procedure consists of three steps. In the first step, when input parameters of the meodel are being set (using set method), the class representing a new model has to remember all input parameters. In the second step, when the application is to be executed (using solveStep method), the tepmplate input file (which is assumed to exist) is used to produce the actual input file with substituted values of input parameters. After the input file(s) are generated, the application itself is executed, typically producing output file(s) with results. In the last step, when the actual model output parameters are requested (using the get method), the cooresponding values are obtained by parsing output files generated.
To ilustrate this concept, we present an example of implementing MuPIF interface to a model computing the average value from property (concentration) time history. Suppose now, that we want to use the existing external application, that can compute an average value from given input values read from a file. The application interface accumulates the input values of concentrations in a list, this is done is set method. During the solution (solveStep method), the accumulated values of concentrations over the time are written into a file, the external application is executed, reading the created file as input and producing an output file containing the computed average. The output file is parsed when the average value is requested (get method).
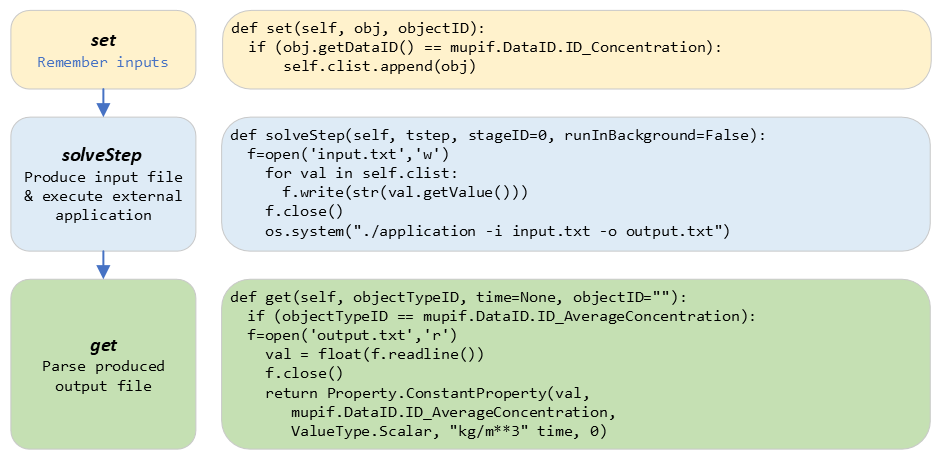
Fig. 2.4 Typical workflow in indirect approach for API implementation
2.6. Developing user workflows
Multiscale/multiphysics simulations are natively supported in MuPIF, allowing easy data passing from one model to another one, synchronizing and steering all models. Simulation workflow of multiscale/multiphysics simulations, called also a simulation scenario, need to define (1) execution model (steering of models) and (2) data model (defines how data are passed/exchanged). Natively, the workflow in MuPIF is represented as Python script combining MuPIF components into workflow.
2.6.1. Workflow templates
2.6.1.1. Sequential
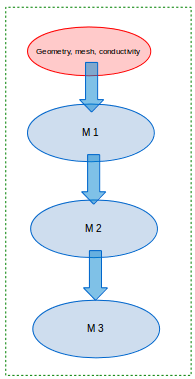
Fig. 2.5 Sequential workflow template
time = 0*mp.U.s
timeStepNumber = 0
targetTime = 10*mp.U.s
while (abs(time-targetTime).getValue() > 1.e-6):
dt=min(
m1.getCriticalTimeStep(),
m2.getCriticalStep(),
m3.getCriticalStep()
)
time = time+dt
if (time > targetTime):
time = targetTime
timeStepNumber = timeStepNumber + 1
istep=TimeStep.TimeStep(time, td, targetTime, n=timeStepNumber)
try:
m1.solveStep(istep)
p = m1.get(PID, m2.getAssemblyTime(istep))
m2.set(p)
m2.solveStep(istep)
# ...
m3.solveStep(istep)
except APIError.APIError as e:
print ("API Error occurred:", e)
break
m1.terminate()
m2.terminate()
m3.terminate()
2.6.1.2. Loosely coupled
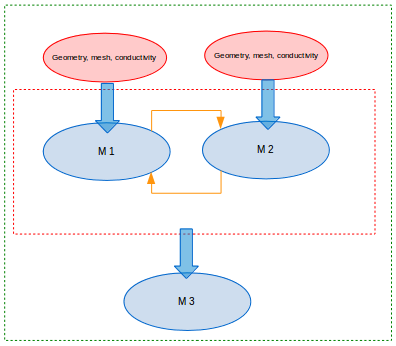
Fig. 2.6 Loosely coupled workflow template
time = 0*mp.U.s
timeStepNumber = 0
targetTime = 10*mp.U.s
while (abs(time-targetTime).getValue() > 1.e-6):
dt = min(
m1.getCriticalTimeStep(),
m2.getCriticalStep(),
m3.getCriticalStep()
)
time = time+dt
if (time > targetTime):
time = targetTime
timeStepNumber = timeStepNumber + 1
istep = TimeStep.TimeStep(time, td, targetTime, n=timestep)
try:
convergedFlag = False
while not convergedFlag:
m1.solveStep(istep)
p1 = m1.get(data_id, m2.getAssemblyTime(istep))
m2.set(p1)
m2.solveStep(istep)
p2 = m2.get(data_id2, m1.getAssemblyTime(istep))
m1.set(p2)
#check for convergence
convergedFlag = checkConvergence()
m3.solveStep()
except APIError.APIError as e:
print ("API Error occurred:", e)
break
m1.terminate()
m2.terminate()
m3.terminate()
2.6.2. Workflow example
To ilustrate the concept, a simple example of steady state, sequential, multiphysic, thermo-mechanical workflow in two dimensional domain is presented. The full implementation is available under examples/Example06* directory of MuPIF installation.
The workflow combines thermal model, solving energy balance and yielding termal field and mechanical model, solving momentum balance equations, yielding primarily displacement field and also strain and stress fields, obtained by postprocessing the displacement field.
In presented example, we consider a domain representing simple cantilever, clamped on the left hand side and subjected to thermal loading, see Fig. 2.7. Heat convection is prescribed on the top edge with ambient temperature 10°C. Left and bottom edges have prescribed temperature 0°C, the right edge has no boundary condition. Initial temperature is set to 0°C, heat conductivity is 1 W/m/K, heat capacity 1.0 J/kg/K, material density 1.0 kg/m³. The material has assigned Young’s modulus as 30 GPa, Poisson’s ratio 0.25 and coefficient of linear thermal expansion 12e-6°C⁻¹.
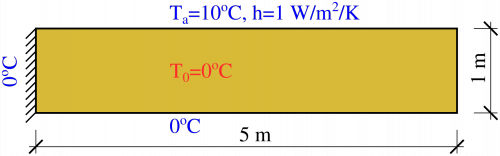
Fig. 2.7 Elastic cantilever subjected to thermal boundary conditions.
The schema of the workflow is depicted in Fig. 2.8.
A workflow can be regardes as a computational receipe and be represented as a plain Python script. But there are many advantages of representing a workflow as a class. Generally speaking, any workflow can be considered as a (more complex) model, that has specific inputs and outputs. The object oriented design of MuPIF allows to naturally represent this concept, introducing Workflow class as a base class for all workflow implementations, derived from Model class. This essentially allows to build a hierarchy of workflows, where the top level workflow may utilise existing models and workflows. Another important advantage of having workflow represented as a class is that the individual workflows can be allocated and executed by a jobManager on remote resources in a same way as individual applications.
By following the concept of representing a workflow as a class, the workflow has to define its metadata and implement similar methods as model, including set and get methods to map inpouts and outputs, and solveStep method. The Workflow class defines additional method solve to generate the time loop over the individual time steps, subsequently solved by solveStep method.
Back to our example. First, the temperature distribution has to be solved in the whole domain from the given initial and boundary conditions. Here we assume for simplicity, that the thermal problem is defined in model specific template, that is passed to thermal model (using set method). The template can be further instanciated using selected input parameters (not done here). Next, the thermal model is updated/solved (*solveStep method) and resulting steady state temperature field is requested (get method) and passed afterwards to the mechanical model (set method), which is updated as well (solveStep) and finally, the corresponding displacement field is available.
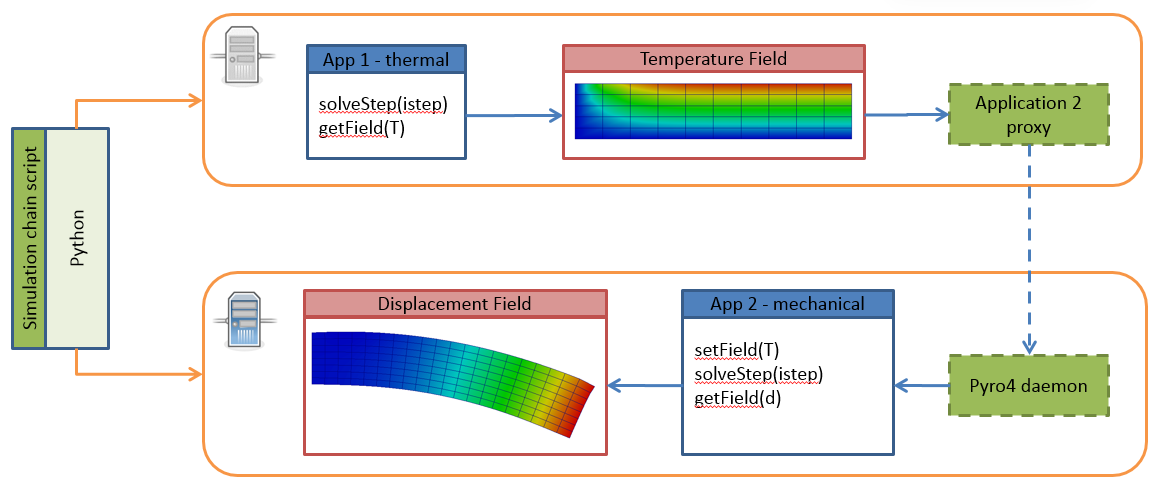
Fig. 2.8 Thermo-mechanical simulation flow
One of the adantages, originating from representing spatil fields as data Type), is that the discretizations for thermal and mechanical problems can be different, as the thermal field takes care of field interpolation. The mesh for thermal problem consist of 50 linear elements with linear approximation and 55 nodes. The mesh for mechanical analysis consist of 168 nodes and 160 elements with linear approximation. Results for final step are shown in Fig. 2.9.
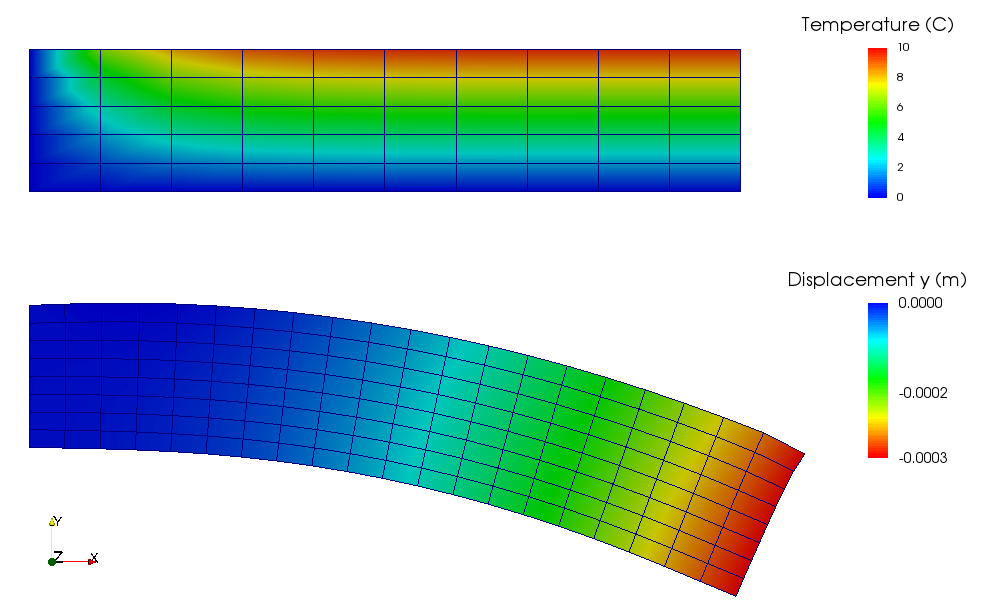
Fig. 2.9 Results of thermo-mechanical simulation
A code below documents an execution of thermo-mechanical simulation in Example06. The implementation of thermal and mechanical solvers are provided in demoapp module.
class Example06(mp.Workflow):
def __init__(self, metadata=None):
MD = {
'Name': 'Thermo-mechanical stationary problem',
'ID': 'Thermo-mechanical-1',
'Description': 'stationary thermo-mechanical problem using finite elements on rectangular domain',
# 'Dependencies' are generated automatically
'Version_date': '1.0.0, Feb 2019',
'Inputs': [],
'Outputs': [
{'Type': 'mupif.Field', 'Type_ID': 'mupif.DataID.FID_Temperature', 'Name': 'Temperature field',
'Description': 'Temperature field on 2D domain', 'Units': 'degC'},
{'Type': 'mupif.Field', 'Type_ID': 'mupif.DataID.FID_Displacement', 'Name': 'Displacement field',
'Description': 'Displacement field on 2D domain', 'Units': 'm'}
],
'Models': [
{
'Name': 'thermal',
'Module': 'mupif.demo',
'Class': 'ThermalModel'
},
{
'Name': 'mechanical',
'Module': 'mupif.demo',
'Class': 'MechanicalModel'
}
]
}
super().__init__(metadata=MD)
self.updateMetadata(metadata)
def initialize(self, workdir='', metadata=None, validateMetaData=True, **kwargs):
super().initialize(workdir=workdir, metadata=metadata, validateMetaData=validateMetaData, **kwargs)
thermalInputFile = mp.PyroFile(filename='inputT.in', mode="rb", dataID=mp.DataID.ID_InputFile)
self.getModel('thermal').set(thermalInputFile)
mechanicalInputFile = mp.PyroFile(filename='inputM.in', mode="rb", dataID=mp.DataID.ID_InputFile)
self.getModel('mechanical').set(mechanicalInputFile)
def solveStep(self, istep, stageID=0, runInBackground=False):
self.getModel('thermal').solveStep(istep, stageID, runInBackground)
self.getModel('mechanical').set(self.getModel('thermal').get(DataID.FID_Temperature, istep.getTime()))
self.getModel('mechanical').solveStep(istep, stageID, runInBackground)
def get(self, objectTypeID, time=None, objectID=""):
if objectTypeID == DataID.FID_Temperature:
return self.getModel('thermal').get(objectTypeID, time, objectID)
elif objectTypeID == DataID.FID_Displacement:
return self.getModel('mechanical').get(objectTypeID, time, objectID)
else:
raise apierror.APIError('Unknown field ID')
def getCriticoalTimeStep(self):
return 1*mp.U.s
def getApplicationSignature(self):
return "Example06 workflow 1.0"
def getAPIVersion(self):
return "1.0"
md = {
'Execution': {
'ID': '1',
'Use_case_ID': '1_1',
'Task_ID': '1'
}
}
demo = Example06()
demo.initialize(metadata=md)
demo.set(mp.ConstantProperty(value=1.*mp.U.s, propID=mp.DataID.PID_Time, valueType=mp.ValueType.Scalar, unit=mp.U.s), objectID='targetTime')
tstep = timestep.TimeStep(time=1*mp.U.s, dt=1*mp.U.s, targetTime=10*mp.U.s)
demo.solveStep(tstep)
tf = demo.get(DataID.FID_Temperature, tstep.getTime())
t_val = tf.evaluate((4.1, 0.9, 0.0))
mf = demo.get(DataID.FID_Displacement, tstep.getTime())
m_val = mf.evaluate((4.1, 0.9, 0.0))
print(t_val.getValue()[0], m_val.getValue()[1])
demo.printMetadata()
demo.terminate()
As already mentioned, the thermo-mechanical simulation workflow can run in various configurations, starting from simplest, local setup to distributed one, where each of the models runs on remote resources. Table 3 shows available examples of thermo-mechanical configurations.
Steering script |
Nameserver |
Thermal application |
Mechanical application |
|
Example06 (local) |
Local |
Local |
Local |
|
Example07 (JobMan, VPN, ssh) |
Local |
Remote |
Remote, JobMan |
Remote, JobMan |
Example08 (JobMan, VPN, ssh) |
Local |
Remote |
Remote, JobMan |
Local |
2.6.3. Workflow generator
Workflow structure can be defined in a graphical user interface, which can translate the structure into a Python implementation of MuPIF Workflow class. The workflow structure must be represented in a JSON format, which follows a schema definition at https://json-schema-viewer.vercel.app/view?url=https://raw.githubusercontent.com/mupif/webWE/master/project_schema.json&expand_buttons=on&show_breadcrumbs=on Such schema describes components (workflow, models, variables, loops, conditions, …) as blocks with input and output dataslots. The data flow is defined by datalinks connecting the dataslots.
With project https://github.com/mupif/webWE a workflow JSON representation can be transformed into a Python code with Node.js application with
node webWE/examples/app_json_to_python.js workflow.json workflow.py class
which produces the workflow.py file.
For example, metadata https://github.com/mupif/webWE/blob/master/examples/example01.json are tranformed into following Python implementation https://github.com/mupif/webWE/blob/master/examples/example01_ref.py
2.7. Distributed Model
Common feature of parallel and distributed environments is a distributed data structure and concurrent processing on distributed processing nodes. This brings in an additional level of complexity that needs to be addressed. To facilitate execution and development of the simulation workflows, the platform provides the transparent communication mechanism that will take care of the network communication between the objects. An important feature is the transparency, which hides the details of remote communication to the user and allows to work with local and remote objects in the same way.
The communication layer is built on Pyro library [4], which provides a transparent distributed object system fully integrated into Python. It takes care of the network communication between the objects when they are distributed over different machines on the network. One just calls a method on a remote object as if it were a local object – the use of remote objects is (almost) transparent. This is achieved by the introduction of so-called proxies. A proxy is a special kind of object that acts as if it were the actual object. Proxies forward the calls to the remote objects, and pass the results back to the calling code. In this way, there is no difference between simulation script for local or distributed case, except for the initialization, where, instead of creating local object, one has to connect to the remote object.

Fig. 2.10 Comparison of local vs. remote object communication scenarios
To make an object remotely accessible, it has to be registered with the daemon, a special object containing server side logic which dispatches incoming remote method calls to the appropriate objects. To enable runtime discovery of the registered objects, the name server is provided, offering a phone book for Pyro objects, allowing to search for objects based on logical name. The name server provides a mapping between logical name and exact location of the object in the network, so called uniform resource identifier (URI). The process of object registration and of communication with remote objects (compared to local objects) is illustrated in Fig. 2.10.
2.7.1. Distributed aspects of the API
One of the important aspect in distributed model is how the data are exchanged between applications running at different locations. The Pyro5 communication layer allows to exchange data in terms of get and set API methods in two ways. The communication layer automatically takes care of any object that is passed around through remote method calls. The receiving side of a call can receive either a local copy of the remote data or the representation of the remote data (Proxy).
The communication in terms of exchanging local object copies can be less efficient than communication with remote objects directly, and should be used for objects with low memory footprint. One potential advantage is that the receiving side receives the copy of the data, so any modification of the local copy will not affect the source, remote data. Also multiple method invocation on local objects is much more efficient, compared to costly communication with a remote object.
On the other hand, the data exchange using proxies (references to remote data) does not involves the overhead of creating the object copies, which could be prohibitively large for complex data structures. Also, when references to the remote objects are passed around, the communication channel must be established between receiving side and remote computer owning the actual object, while passing local objects requires only communication between caller and receiver.
Both approaches have their pros and cons and their relative efficiency depends on actual problem, the size of underlying data structures, frequency of operations on remote data, etc.
Pyro5 will automatically take care of any Pyro5 objects that you pass around through remote method calls. If the autoproxying is set to on (AUTOPROXY = True by default), Pyro5 will replace objects by a proxy automatically, so the receiving side can call methods on it and be sure to talk to the remote object instead of to a local copy. There is no need to create a proxy object manually, a user just has to register the new object with the appropriate daemon. This is a very flexible mechanism, however, it does not allow explicit control on the type of passed objects (local versus remote).
Typically, one wants to have explicit control whether objects are passed as proxies or local copies. The get methods (such as getProperty, getField) should not register the returned object at the Pyro5 daemon. When used, the remote receiving side obtains the local copy of the object. To obtain the remote proxy, one should use getFieldURI API method, which calls getField method, registers the object at the server daemon and returns its URI. The receiving side then can obtain a proxy object from URI. This is illustrated in the following code snippet:
field_uri = Solver.getFieldURI(DataID.FID_Temperature, 0.0)
field_proxy = Pyro5.Proxy(uri)
2.7.2. Requirements for distributed computing
To enable the discovery of remote objects a nameserver service is required, allowing to keep track of individual objects in network. It is also allows to use readable uniform resource identifiers (URI) instead of the need to always know the exact object id and its location.
The platform is designed to work on virtually any distributed platform, including grid and cloud infrastructure. For the purpose of performing simulations within a project, it is assumed that individual simulations and therefore the individual simulation packages will be distributed over the network, running on dedicated servers provided by individual partners, forming grid-like infrastructure.
The MuPIF also supports integration of HPC recources, providing a support for simple integration of models running on HPC hardware.
2.7.3. Internal platform solution - ModelServer resource allocation
This solution has been developed from a scratch targeting fulfilment of minimal requirements only while providing simple setup. The resource allocation is controlled by ModelServer. Each computational server within a platform should run an instance of ModelServer, which provides services for allocation of application instances based on user request and monitoring services.
The ModelServer is implemented as python object like any other platform components and is part of platform source code. It is necessary to create an instance of ModelServer on each application server and register it on the platform nameserver to make it accessible for clients running simulation scenarios. This allows to access ModelServer services using the same Pyro technology, which makes the resource allocation to be part of the the simulation scenario. Typically, the simulation scenario script first establishes connection to the platform nameserver, which is used to query and create proxies of individual ModelServers. The individual ModelServers are subsequently requested to create the individual application instances (using allocateJob service) and locally represented by corresponding proxy objects. Finally, the communication with remote application instances can be established using proxies created in the previous step, see Fig. 2.11 illustrating typical work flow in the distributed case.
The model server has only limited capability to control allocated resources. In the present implementation, the server administrator can impose the limit on number of allocated applications. The configuration of the jobmanager requires only simple editing of configuration file. The individual applications are spawned under new process to enable true concurrency of running processes and avoid limitations of Python related to concurrent thread processing.

Fig. 2.11 Typical control flow with resource allocation using ModelServer.
The status of individual model servers can be monitored with the jobManStatus.py script, located in tools subdirectory of the platform distribution. This script displays the status of individual jobs currently running, including their run time and user information. The information displayed is continuously refreshed, see Fig. 2.12.
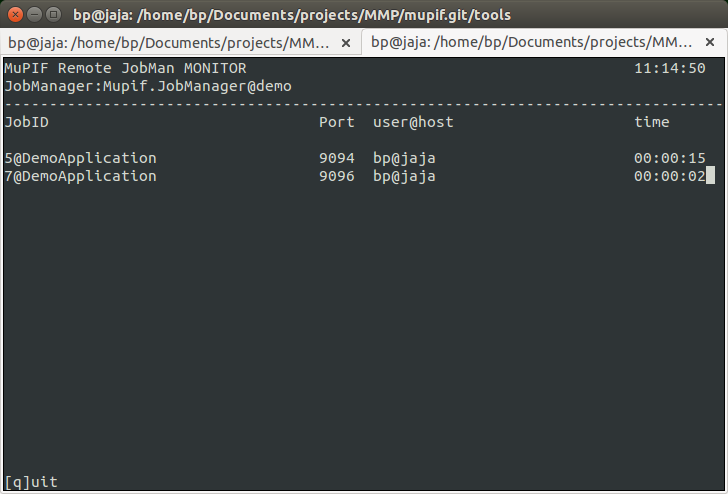
Fig. 2.12 Screenshot of model server monitoring tool
The internal jobManager does not provide any user authentication service at the moment. The user access is assumed to be controlled externally, using ssh authorization. For example, to establish the authorized connection to a remote server and platform services (jobManager) using a ssh tunnel, a valid user credentials for the server are required. The secured, authenticated connection is realized using setting up ssh tunnel establishing a secure and trusted connection to a server. The ssh connections can be authorized by traditional user/passwords or by accepting public ssh keys generated by individual clients and send to server administrators. More details are given in a Section on SSH tunneling.
The status of individual computational servers can be monitored online using the provided monitoring tool. A simple ping test can be executed, verifying the connection to the particular server and/or allocated application instance.
2.7.3.1. Setting up a Model Server
The skeleton for application server is distributed with the platform and is located in examples/Example04-JobMan-distrib.
The sever.py script runs the model server itself; it will become available for incoming connection (at an arbitrary port number, which is reachable from all clients in the VPN; see Section 2.1 for details) and registers itself in the name server. Model will be then instantiated and executed upon request. (the runServer is responsible for executing these steps).
Model server configuration options are documented in the reference manual; of particular importance are the following parameters:
ns: name server is found viamupif.pyroutil.connectNameserver(the logic of usingMUPIF_NSenvironemnt variable or configuration file is described in Section 2.1.4.2);appClass: model class;appName: name under which the model will be registered in the name server;maxJobslimiting the number of concurrent instances running;
Fig. 2.13 shows the distributed model running atop the VPN.

Fig. 2.13 Example16 thermo-mechanical analysis displaying ports in a distributed setup using VPN.
To start an application server run (Example04-JobMan-distrib):
$ python3 server.py
The command logs on screen and also in the server.log logfile the individual requests (as configured within setup.py).
The status of the all model servers can be shown on-line from any computer by running (provided MUPIF_NS is set correctly):
$ python3 -m mupif.cli servers
[
{
"ns": {"name": "CVUT.demo01", "uri": "PYRO:obj_aca860f9d7834f2e8f8c81097f4981e2@172.24.1.1:38605", "metadata": {"type:jobmanager"}},
"numJobs": {"max": 4, "curr": 0, "total": 4303},
"jobs": [],
"status": true,
"signature": "Mupif.JobManager.ModelServer"
}
]
2.7.4. HPC integration
The massively parallel simulations on HPC are typically run in scheduled execution mode, which ensures optimal allocation and use of resources. In this model, the user creates a job description file, describing what are the inputs, outputs, what to execute and specify resource allocation requirements (number of nodes, memory, required runtime). The job is subsequently submitted and later executed by the HPC scheduling system when resources are available. In addition, there is typically no possibility of running permanent services on HPC side. This mode of operation has certain implications on how the HPC model interface is to be implemented.
The efficient use of HPC resources requires that all needed pre and post processing should be done outside HPC, and only actual model execution be performed using HPC. Individual ModelServers responsible for interacting with simulation workflows must ensure, that resource allocation, preprocessing inputs and postprocessing outputs for or from actual model execution is done without using HPC resources, i.e., must be done before or after submitting the job and only the model execution phase should utilize HPC. This implies the need for running the model APIs on dedicated server (external resource to HPC), which interacts with HPC batch system to schedule the actual model execution.
Additional considerations should be taken when the model is executed from workflow within time loop involving the data exchange with other models. The efficient utilization of HPC resources generally implies that in such a case, the model API should schedule the execution for individual time step updates of the model, and this may require the model API to support restart capability from saved state, to prevent model utilizing costly HPC resources when waiting for potentially other models involved in the time loop.
There are different HPC integration levels possible with different requirements. Here we follow the less intrusive (from the HPC perspective) integration, illustrated on Fig. 2.14. The requirements are following:
A dedicated platform user account needs to be set up on HPC side, allowing to perform file transfer and job submission. On HPC, standardized job scheduling subsystem is required (SLURM Workload manager, 2021), (Wikipedia article on Portable Batch System, 2021).
External MuPIF node running ModelServer service for models to be executed on HPC (with MuPIF installation). The node will also run individual model APIs, responsible for input collection, preparation of job scripts and their scheduling on HPCs, monitoring execution and result collection. The node must have network connectivity to HPC infrastructure allowing to perform file transfer and job submission using HPC credentials.
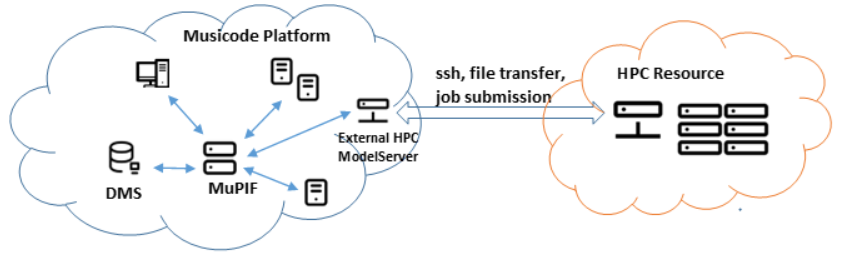
Fig. 2.14 Schema of 3rd party HPC integration
The MuPIF platform has been extended to provide dedicated HPC integration layer, that abstracts the various aspects of HPC integration: secure data transfer, job submission and monitoring. Both mainstream job submission systems (PBS, SLURM) are supported.